今天本魔已將先前提到的機器人動態同步上傳至Github,
當環境都架設好之後便可以使用,
而機器人動態同步的主系統為ROS,
所以在Linux上架設好ROS環境後,
開啟ROS Serial Server,
讓所有機器人連線到同一區域網路下,
確認所有機器人皆連到主機後,
就可以開始同步動作啦~。
而這機器人分別是史加納以及86小六足,
在此奉上它們的開源Github,
要做幾隻就做幾隻,
只要WIFI AP夠強,
要做一整個小巨蛋的小六足跳舞也不是問題呢XD
Github中已有編好的妖怪舞給各位做為範例!
當環境都架設好之後便可以使用,
而機器人動態同步的主系統為ROS,
所以在Linux上架設好ROS環境後,
開啟ROS Serial Server,
讓所有機器人連線到同一區域網路下,
確認所有機器人皆連到主機後,
就可以開始同步動作啦~。
而這機器人分別是史加納以及86小六足,
在此奉上它們的開源Github,
要做幾隻就做幾隻,
只要WIFI AP夠強,
要做一整個小巨蛋的小六足跳舞也不是問題呢XD
Github中已有編好的妖怪舞給各位做為範例!
86Hexapod: https://github.com/roboard/86Hexapod
 |
| 86小六足 |
Skarner: https://github.com/RoBoardGod/Robot-Skarner
 |
| 史加納(偽娘型態) |
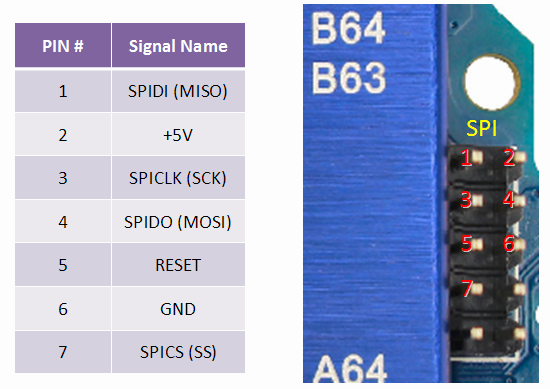
而史加納與86小六足接線圖也請參考下圖:
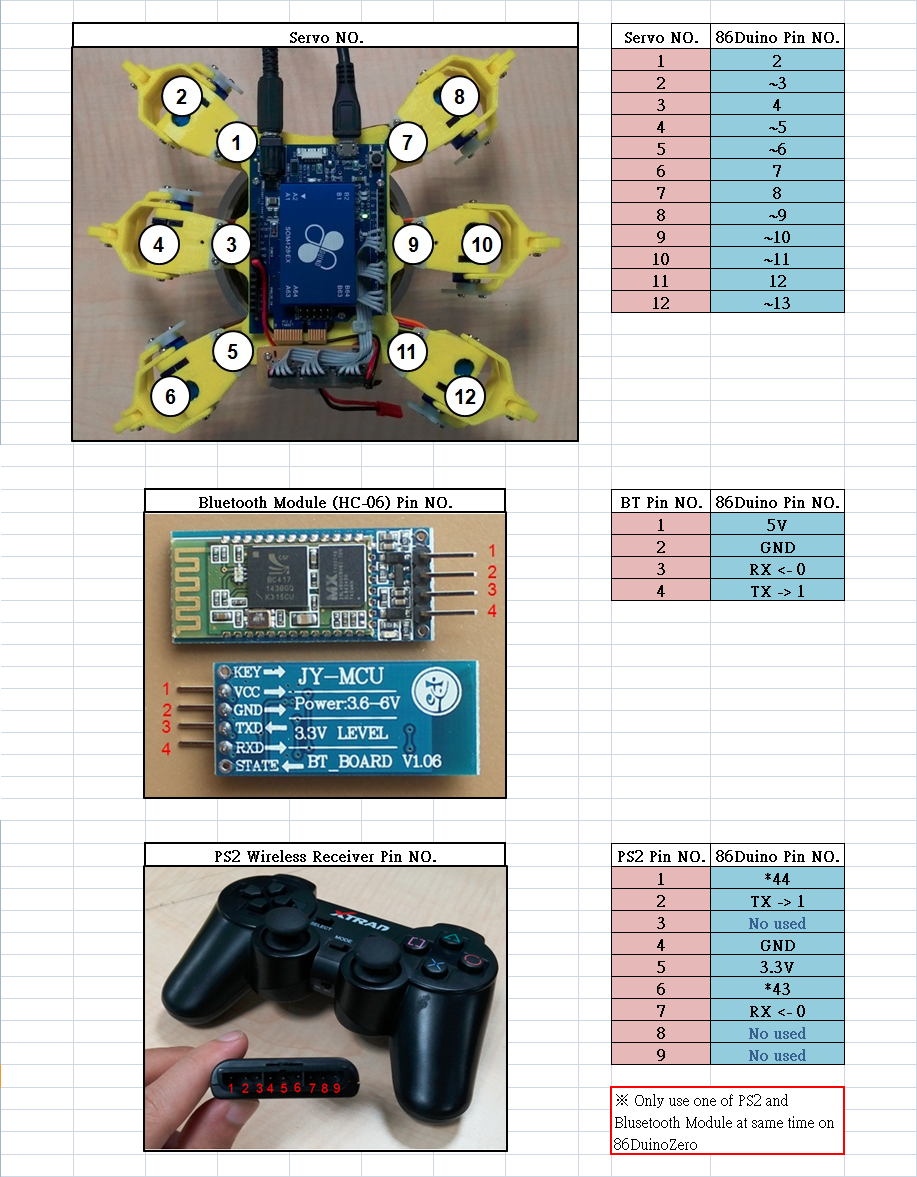 |
| 86Hexapod for 86Duino Zero |
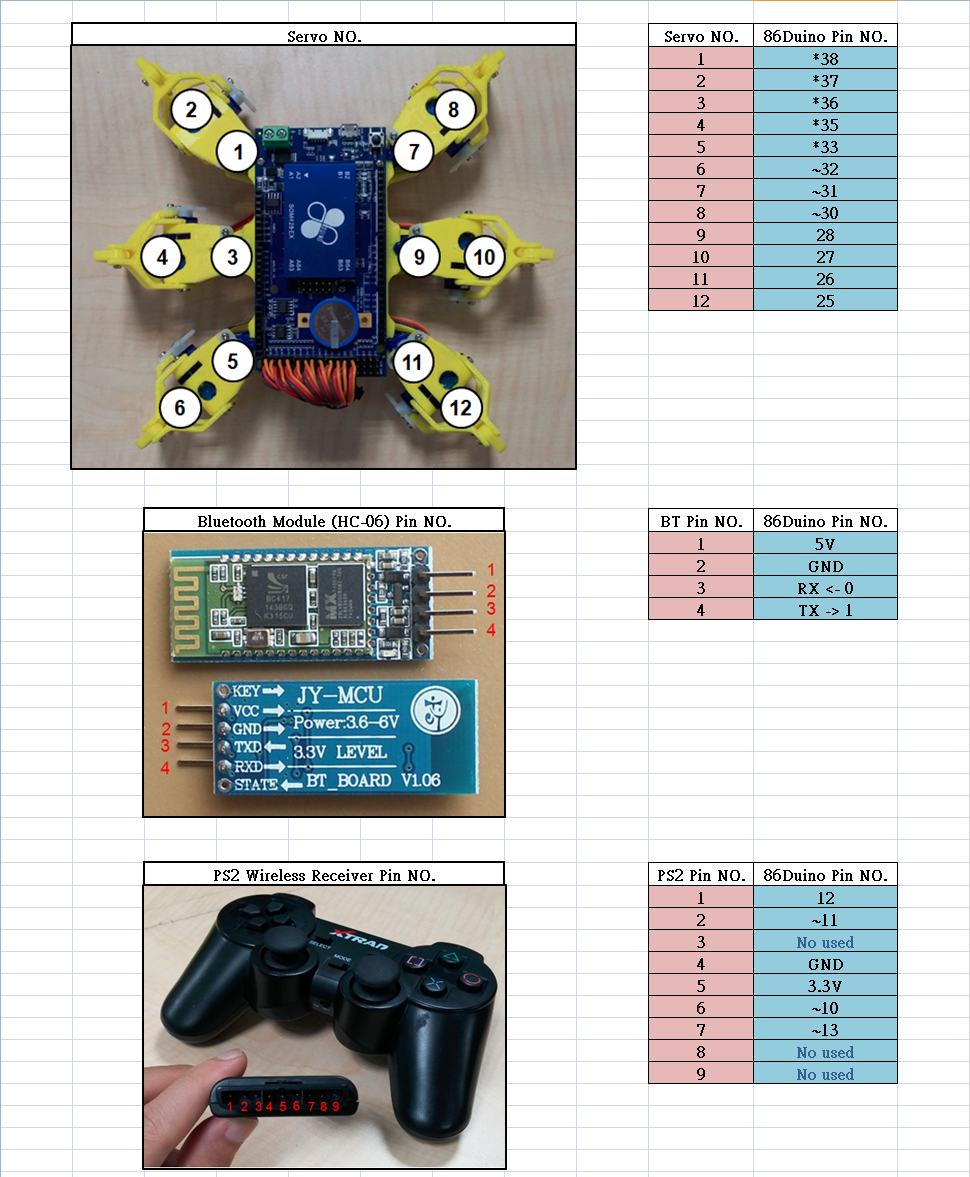 |
| 86Hexapod for 86Duino One |
 |
| Skarner for 86Duino One |